Preferencias sobre cookies
Preferencias sobre cookies




Monitor de bacterias BACTcontrol (cámara de...

Monitor de bacterias BACTcontrol (cámara de reacción de 2 ml)
ÚLTIMAS NOTICIAS
SECCION PRINCIPAL DE OCEANOGRAFIA
Monitor de bacterias BACTcontrol (cámara de reacción de 2 ml)
Espectrofotómetro UV Visible Haz de referencia 4 nm UVILINE 9600/9300
Monitor de bacterias BACTcontrol (cámara de reacción de 2 ml)
Analizador para DQO DBO TOC SST NO3 sin reactivo PASTEL UV

COMET-300 es un AUV de última generación con capacidades avanzadas de navegación y detección
Los grabadores acústicos subacuáticos SYLENCE-LP permiten una monitorización acústica rentable y fiable con la mejor relación calidad-precio del mercado

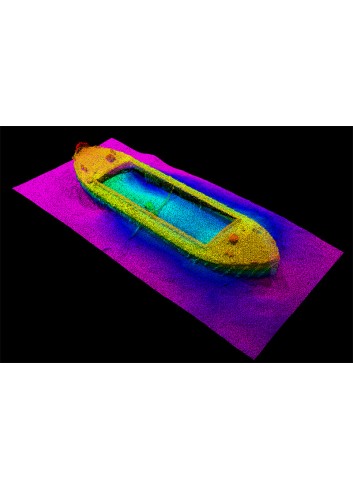
Software de vanguardia para la adquisición y procesamiento de datos de sonar para sistemas de sonar de barrido lateral y sub-bottom profiler

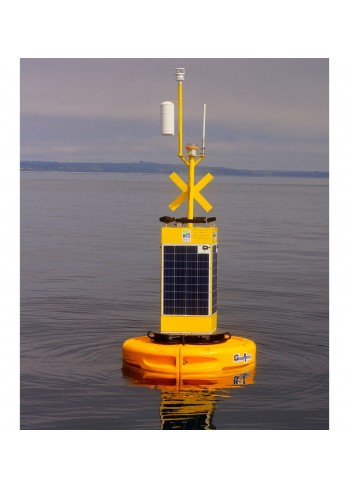
Boyas oceanográficas con múltiples funciones y adaptables a las necesidades del cliente.
Portable UV PEspectrofotómetro Visible Monohaz 10 nm PRIM Advanced
RESEA es un registrador acústico subacuático de 4 entradas diseñado para permitir a los operadores de PAM

El propósito del kit GPS submarino es hacer que la tecnología de posicionamiento subacuático esté disponible para todos.

WiMo es una sonda autónoma multiparamétrica con pincel y teletransmisión de datos. Disponible con flotador o boya GPS/GPRS.

Redes Hydrobios Neuston, Manta y red simple, para muestreo de microplásticos.

Sistema receptor de emisores acústicos combinado de superficie y para buzo.

El sonar multihaz Tritech Gemini 1200ik funciona a dos frecuencias acústicas, 720 kHz y 1.200 Khz

El Perfilador Aquadopp es una herramienta económica para la medida en aguas someras a escalas superiores a 1 s